どんなサービスなのか
プローブデータ
車に搭載したGPS及びその他のセンサにより計測される時系列データを意味します。データ項目としては、経度座標、緯度座標、時刻、加速度、画像、運搬物の温度などがあります。最初の3項目は一般に常に計測されますが、それ以外の計測データの内容はケースバイケースです。
マップマッチング
GPSで計測された座標を基に、車がどの道路リンクをどちらの方向に走行したか推測する、即ちプローブデータと道路リンクを関係付ける処理を意味します。プローブデータ処理の中核に当たります。
プローブデータ処理
マップマッチングの成果から、例えばリンク毎の走行速度など、業務目的に応じた多様なアウトプットをプローブデータから算出する処理を意味します。
プローブデータデータ処理の流れ
プローブデータ処理の流れは図1に示す通りです。処理システムは、以下の3つのサブシステムから構成されます。
- 位置情報取得サブシステム
- マップマッチングサブシステム
- 交通情報抽出サブシステム
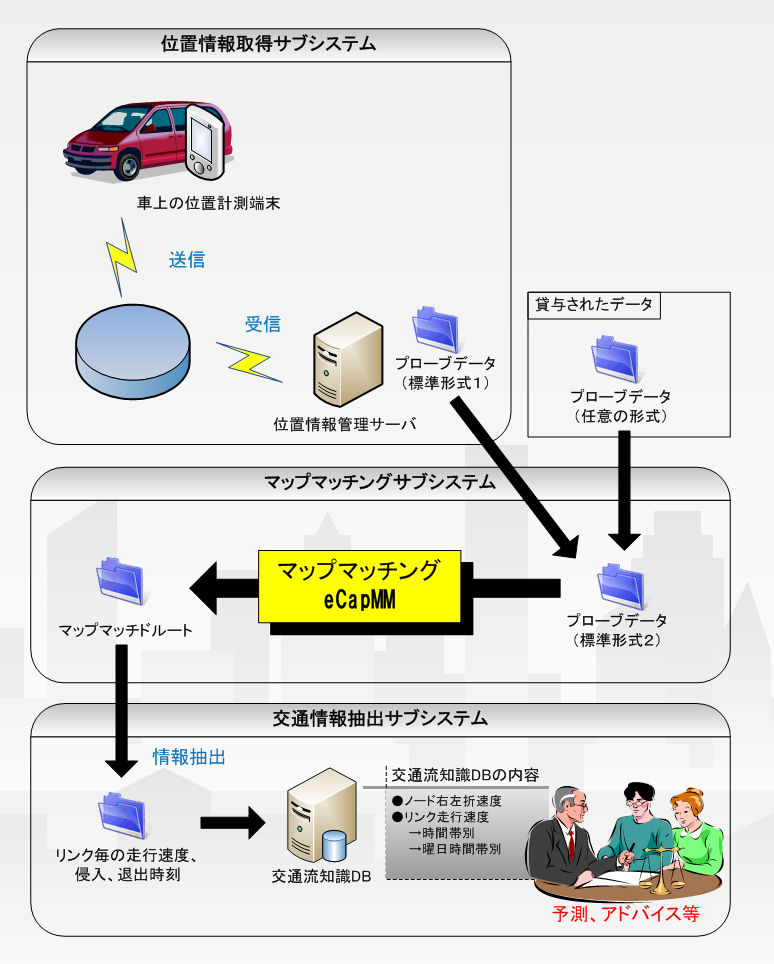
図1 プローブデータ処理の流れ
位置情報取得サブシステム
概要
移動体に搭載した位置計測端末で計測した、移動体毎の時系列的な座標をサーバに集めます。現段階では、位置計測端末としては、スマートフォン(アンドロイドOS2.3)に対応しています。
アンドロイド端末側機能
アンドロイドの位置計測端末操作画面を図2に示します。計測間隔は、指定した一定の間隔ですが、その指標として、時間か距離を選択出来ます。 データを端末からサーバに送信する間隔は、自動送信か手動送信を選択出来ます。自動送信の場合は、一定時間毎に送信します。手動送信の場合は、送信したい時に、送信ボタンをクリックして下さい。 サーバへの送信に成功したら、計測したプローブデータは、端末から自動的に消去します。
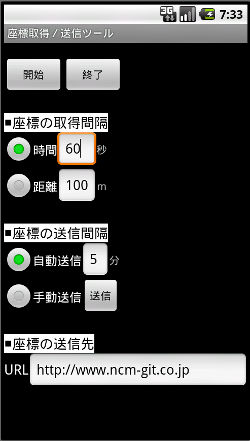
図2 アンドロイド端末の操作画面
適用例
本サブシステムを利用して、計測した座標データを図3に示します。
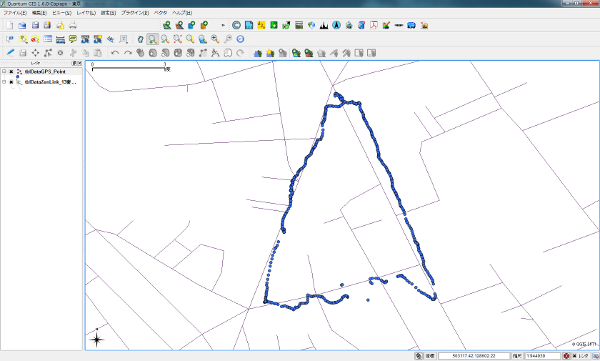
図3 計測データの実例 ※道路地図の出典:住友電工DRM
マップマッチングサブシステム
マップマッチングサブシステムの中核をなすマップマッチングエンジンeCapMMの特徴を表1に示します。
| 項番 | 分類 | タイトル | 内容 |
|---|---|---|---|
| 1 | 速度性能 | 高速性 | 大量データの短時間処理のため、高速な処理を実現する。 |
| 2 | 精度 | 先読みマッチング | 図4に示す様に、先を見ないと分からないケースでも正しく処理する。 |
| 3 | 異常状態への耐性 | GPSの精度低下により計測座標が揺らぐ場合、或いは走行した道路がマッチング先の道路ネットワークに登録されていない場合に対しても正しく処理出来る。 | |
| 4 | 規制の考慮 | 弊社の最適ルート探索エンジンeREXを利用することで、規制を考慮する。 | |
| 5 | アルゴリズム | Coarse To Fine | 粗いレベルから細密なレベルへとマッチングを進めることで、効率的な処理を実現する。 |
| 6 | 多数のパラメータによる制御 | マップマッチングを制御するパラメータが多数実装されているため、柔軟な設定が可能である。 | |
| 7 | 柔軟なシステム構成 | アウトプットの多様性 | 実際に走行したリンクや状態(新規リンク、停止、Uターン等)など多様なアウトプットを算出する。 |
| 8 | カスタマイズ | カスタマイズ出来る余地が高い。 |
弊社のマップマッチングエンジンeCapMMの特徴を実例で示してみました。こちらを御参照下さい。
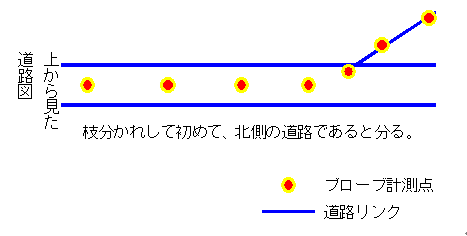
図4 先読みマッチングが必要なケース(併走する道路)
交通所法抽出サブシステム
マップマッチングサブシステムの成果から、ニーズに応じた交通情報を抽出します。本サブシステムの機能は以下の様に分類出来ます。
情報抽出
マップマッチングの成果(マップマッチドルート)から、必要とされる交通情報を算出する。
視覚化
GISを用いて、背景道路ネットワークデータ、プローブデータ、マップマッチングの成果、抽出された交通情報を表示、印刷する。
納品形式への変換
業務仕様により決められた形式に処理成果を変換する。
以下、実際のデータを用いて、交通情報(この場合は、渋滞情報)の生成フローを示します。
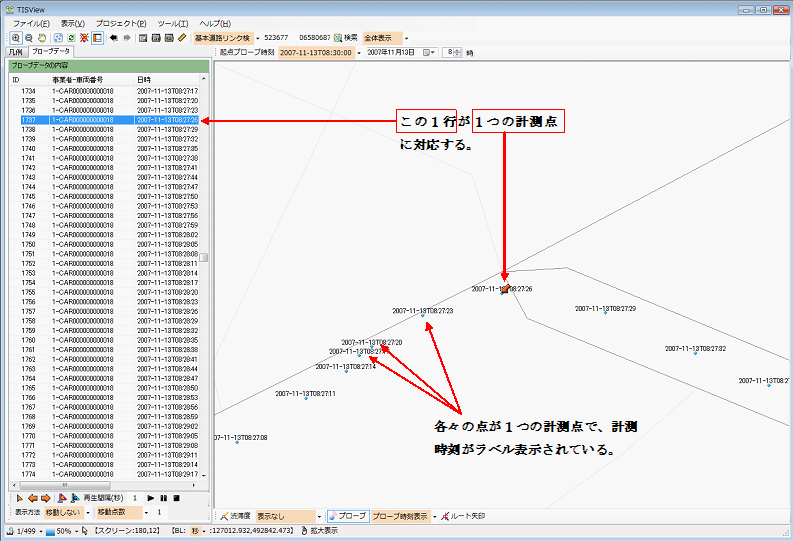
図5 おおもとのデータソースとなるプローブ計測点情報 ※道路地図の出典:住友電工DRM
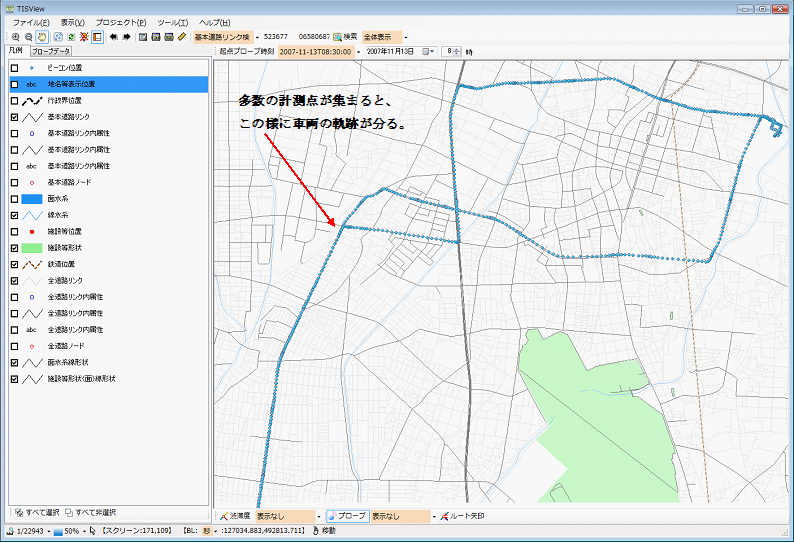
図6 プローブ計測点(多数の集合) ※道路地図の出典:住友電工DRM
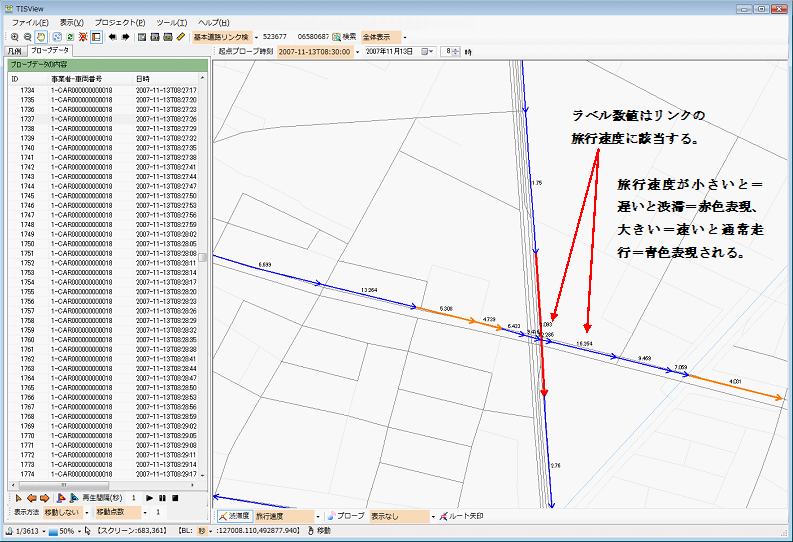
図7 リンク毎の旅行速度の算出(拡大図) ※道路地図の出典:住友電工DRM
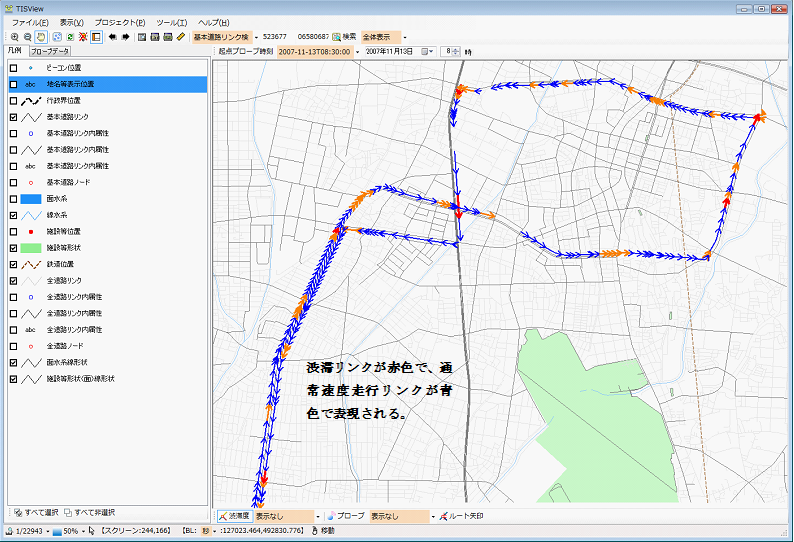
図8 リンク毎の旅行速度の算出(広域図) ※道路地図の出典:住友電工DRM
費用はいくら掛かるのか
処理における入出力の仕様を伺った上で、見積もりさせて頂きます。